#include <ros/ros.h>#include <map>#include <vector>#include <geometry_msgs/Pose.h>#include <geometry_msgs/PoseStamped.h>#include <nav_msgs/OccupancyGrid.h>#include <nav_msgs/GetMap.h>#include <cpswarm_msgs/AreaDivisionEvent.h>#include <swarmros/String.h>#include "lib/area_division.h"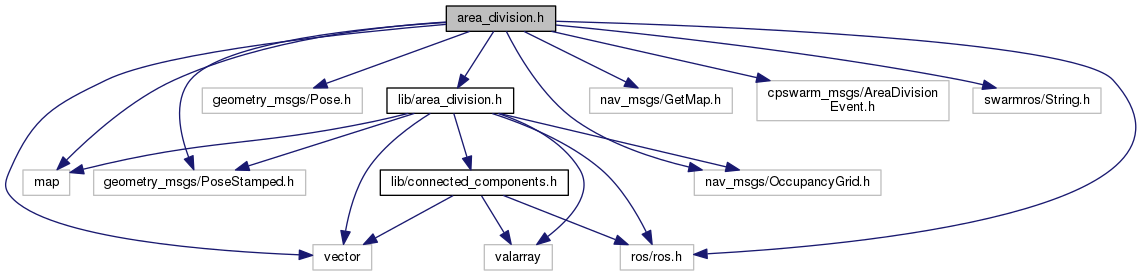
Go to the source code of this file.
Variables | |
| Publisher | area_pub |
| Publisher to visualize the assigned area grid map. More... | |
| area_division * | division |
| The object encapsulating the area division optimization algorithm. More... | |
| nav_msgs::OccupancyGrid | gridmap |
| The complete grid map. More... | |
| bool | map_valid |
| Whether a valid grid map has been received. More... | |
| Publisher | pos_pub |
| Publisher to stop the CPS. More... | |
| geometry_msgs::Pose | pose |
| Current position of the CPS. More... | |
| bool | pose_valid |
| Whether a valid position has been received. More... | |
| Rate * | rate |
| ROS rate object for controlling loop rates. More... | |
| bool | reconfigure |
| Whether the swarm configuration has changed and the area needs to be divided again. More... | |
| map< string, geometry_msgs::PoseStamped > | swarm_pose |
| The positions of the other swarm members. More... | |
| Publisher | swarm_pub |
| Publisher to syncronize with other CPSs. More... | |
| double | swarm_timeout |
| The time in seconds to wait after an area division event before starting the area division. More... | |
| bool | swarm_valid |
| Whether valid position information has been received from the other swarm members. More... | |
| Time | sync_start |
| The time at which the synchronization for the area division started. More... | |
| string | uuid |
| UUID of this CPS. More... | |
| bool | visualize |
| Whether to publish the area division on a topic for visualization. More... | |
Variable Documentation
◆ area_pub
| Publisher area_pub |
Publisher to visualize the assigned area grid map.
Definition at line 35 of file area_division.h.
◆ division
| area_division* division |
The object encapsulating the area division optimization algorithm.
Definition at line 75 of file area_division.h.
◆ gridmap
| nav_msgs::OccupancyGrid gridmap |
The complete grid map.
Definition at line 65 of file area_division.h.
◆ map_valid
| bool map_valid |
Whether a valid grid map has been received.
Definition at line 70 of file area_division.h.
◆ pos_pub
| Publisher pos_pub |
Publisher to stop the CPS.
Definition at line 25 of file area_division.h.
◆ pose
| geometry_msgs::Pose pose |
Current position of the CPS.
Definition at line 55 of file area_division.h.
◆ pose_valid
| bool pose_valid |
Whether a valid position has been received.
Definition at line 60 of file area_division.h.
◆ rate
| Rate* rate |
ROS rate object for controlling loop rates.
Definition at line 40 of file area_division.h.
◆ reconfigure
| bool reconfigure |
Whether the swarm configuration has changed and the area needs to be divided again.
Definition at line 90 of file area_division.h.
◆ swarm_pose
| map<string, geometry_msgs::PoseStamped> swarm_pose |
The positions of the other swarm members.
Definition at line 45 of file area_division.h.
◆ swarm_pub
| Publisher swarm_pub |
Publisher to syncronize with other CPSs.
Definition at line 30 of file area_division.h.
◆ swarm_timeout
| double swarm_timeout |
The time in seconds to wait after an area division event before starting the area division.
Definition at line 80 of file area_division.h.
◆ swarm_valid
| bool swarm_valid |
Whether valid position information has been received from the other swarm members.
Definition at line 50 of file area_division.h.
◆ sync_start
| Time sync_start |
The time at which the synchronization for the area division started.
Definition at line 95 of file area_division.h.
◆ uuid
| string uuid |
UUID of this CPS.
Definition at line 20 of file area_division.h.
◆ visualize
| bool visualize |
Whether to publish the area division on a topic for visualization.
Definition at line 85 of file area_division.h.