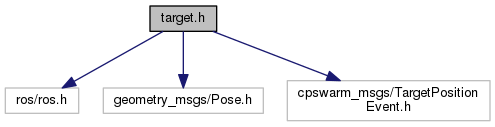
#include <ros/ros.h>#include <geometry_msgs/Pose.h>#include <cpswarm_msgs/TargetPositionEvent.h>
Include dependency graph for target.h:
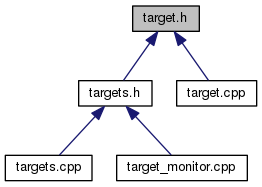
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | target |
| A target that is monitored by the CPSs. More... | |
Enumerations | |
| enum | target_state_t { TARGET_UNKNOWN = 0, TARGET_KNOWN, TARGET_TRACKED, TARGET_ASSIGNED, TARGET_LOST, TARGET_DONE } |
| An enumeration for the state of a target. More... | |
Enumeration Type Documentation
◆ target_state_t
| enum target_state_t |