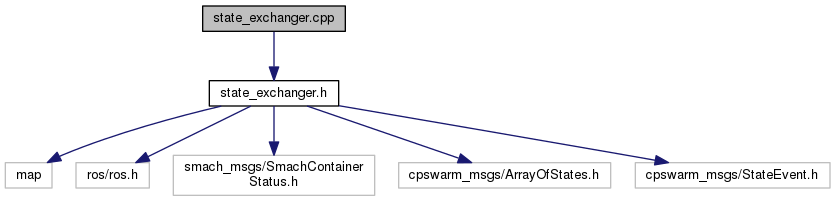
#include "state_exchanger.h"
Include dependency graph for state_exchanger.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| A ROS node that exchanges the behavioral state between CPSs in a swarm. More... | |
| void | state_callback (const smach_msgs::SmachContainerStatus::ConstPtr &msg) |
| Callback function for state updates. More... | |
| void | swarm_state_callback (cpswarm_msgs::StateEvent msg) |
| Callback function for state updates from other swarm members. More... | |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
A ROS node that exchanges the behavioral state between CPSs in a swarm.
- Parameters
-
argc Number of command line arguments. argv Array of command line arguments.
- Returns
- Success.
Definition at line 47 of file state_exchanger.cpp.
◆ state_callback()
| void state_callback | ( | const smach_msgs::SmachContainerStatus::ConstPtr & | msg | ) |
Callback function for state updates.
- Parameters
-
msg State received from the CPS state machine.
Definition at line 7 of file state_exchanger.cpp.
◆ swarm_state_callback()
| void swarm_state_callback | ( | cpswarm_msgs::StateEvent | msg | ) |
Callback function for state updates from other swarm members.
- Parameters
-
msg The state received from another CPS.
Definition at line 24 of file state_exchanger.cpp.